DSP System Design and Development Process
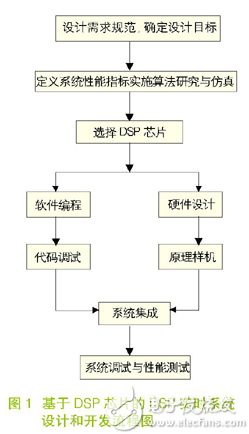
When designing a DSP system, it's essential to define the requirements and set clear design goals. This process involves addressing two main categories: signal processing tasks and non-signal processing considerations.
Signal processing problems typically involve analyzing the characteristics of input and output signals, selecting appropriate DSP algorithms, and simulating these algorithms using high-level programming languages on general-purpose computers. This simulation helps verify whether the system meets the required performance metrics before moving to actual hardware implementation.
On the other hand, non-signal processing issues include factors such as the application environment, equipment reliability, maintainability, power consumption, size, weight, cost, and overall performance-to-price ratio. These elements are crucial for ensuring that the final product is not only technically sound but also practical and economically viable in real-world scenarios.
Algorithm Research and Simulation is a critical phase in DSP system development. It’s usually performed using high-level languages on general-purpose computers, with an emphasis on making the simulation as realistic as possible—ideally mimicking the behavior of a DSP processor during execution.
Key Considerations When Selecting a DSP Chip:
(1) Accuracy: DSP chips can be either fixed-point or floating-point. Fixed-point devices are often preferred due to their lower cost, faster speed, and reduced power consumption. However, careful attention must be given to signal dynamic range, and scaling operations should be included in the code to avoid overflow or underflow.
(2) Word Length: Most floating-point DSPs use 32-bit data words, while fixed-point models often use 16 bits. Motorola’s fixed-point chips, for example, use 24-bit words to balance precision and cost. The word length significantly affects chip size, pin count, memory requirements, and overall system cost. It's generally best to choose the minimum necessary word length to keep costs down.
(3) Memory Configuration: On-chip memory size, number of memory blocks, and bus architecture all play a role in determining the chip’s performance and cost. For instance, different versions of the same DSP series from TI may have varying memory configurations and resource allocations.
(4) Development Tools: These are vital for any DSP project. Software tools like simulators help test the algorithm before hardware is built, while hardware emulators allow real-time debugging of the system. Using development boards early in the process can greatly enhance efficiency, even if they are later used as the final product in small-scale production.
(5) Power Consumption and Management: In portable devices, minimizing power usage is essential. Many modern DSPs support low-voltage operation (e.g., 3.3V, 2.5V, 1.8V), which reduces power consumption. Features like sleep mode and standby mode further help save energy, depending on the specific application and processor configuration.
(6) Cost and Manufacturer Support: While cost is a key factor, cheaper chips may come with limitations in functionality and performance. It's important to evaluate long-term support, availability, and the manufacturer’s commitment to the chip’s lifecycle when choosing a DSP.
(7) Multi-Processor Support: As applications grow more complex, especially in areas like radar and communications, multi-processor systems become necessary. Modern DSPs often include dedicated interfaces or DMA channels to facilitate efficient communication between processors, improving overall system performance.
Introduction to DSP Processor Software and Hardware Development Tools
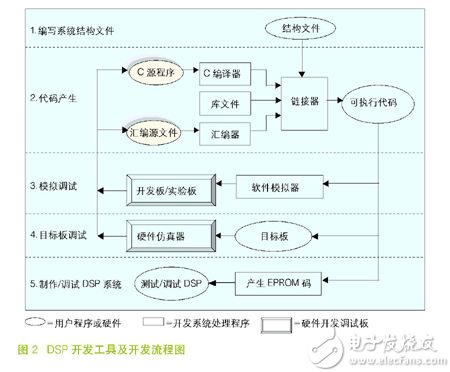
As DSP processors become more powerful and development cycles shorten, reliance on development tools has grown. Figure 2 illustrates the typical DSP development flow.
Although different manufacturers offer various tools, most share common components, including:
â—† C Compiler: This allows developers to write programs in C, which is then compiled into assembly code. While C is easier to learn, the resulting code may not be as efficient as manually written assembly. To improve performance, many systems provide optimized library functions that can be called directly from C.
â—† Linker: Combines object files from the assembler and library functions into a single executable module, forming the final DSP program.
â—† Hardware Simulator (Emulator): Connects the target DSP hardware to a PC via a JTAG interface, allowing real-time debugging of the system in a simulated environment.
â—† Assembler: Converts assembly language source code into machine-readable object files.
â—† Simulator: A software-based tool that runs without hardware, enabling step-by-step execution, breakpoint setting, and memory observation. Although useful for initial testing, it may not perfectly simulate external interfaces.
Agricultural Drone,Crop Sprayer Drone,Drone Crop Sprayer,Agricultural Sprayer Drone
Xuzhou Jitian Intelligent Equipment Co. Ltd , https://www.jitianintelligent.com