In general, robots have two common design genres. The first is a simple and efficient robot that is oriented towards the completion of a job. It relies on two or three "fingers" (pliers formed) to do a lot of work easily. The second is a precise simulation based entirely on human hands – the design of the other four fingers with a thumb, based on the human hands that have evolved over millions of years to design the robot, because all the objects around us are based on Our hands are designed, so if you want the robot to do as much as possible, it is best to have a pair of hands like real people.
In view of the inherent complexity of real people, it is inevitable to adopt many compromises when designing anthropomorphic bionic hands, so that they can work normally while maintaining the shape of the manpower. ZheXu and Emanuel Todorov from the University of Washington in Seattle pioneered the development of one of the finest and most sporty anthropomorphic bionic hands ever, with the ultimate goal of completely replacing human hands.
Regarding the importance of designing a new robotic hand to them, Xu said:
"The conventional method of anthropomorphic robotic design is to simplify the mechanization of biological components with parts such as hinges, linkages, and balance rings, thereby simplifying the seemingly complex human reference. This approach is for understanding and imitating human hands. The principle of motion is helpful, but it inevitably creates a bad difference between some people and the robot, because most of the significant biomechanical features on the human hand are discarded during the mechanization process. These robotic and human biomechanics are The intrinsic mismatch prevents us from using natural hand movements to directly control them. Therefore, no humanoid robot can reach the dexterity of the human hand."
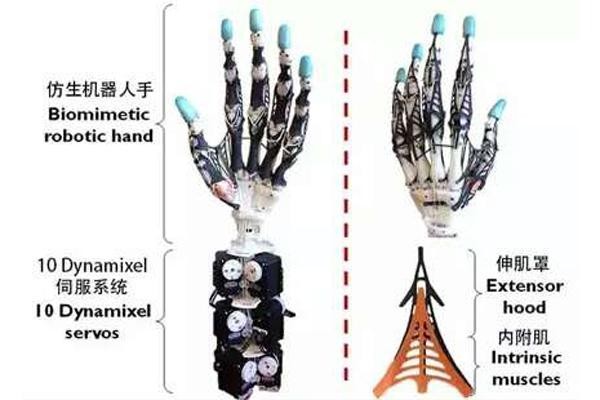
Xu and Todorov decided to start their robotic project from scratch, mechanically copying the manpower in the most accurate way possible. First, they scanned the bones of the human hand with a laser and then printed the matching artificial bones in 3D , enabling them to replicate the flexible joints that our hands have.
"For example, our movement of the thumb depends on the complex shape of the trapezoidal bone in the carpometacarpal joint (CMC). Due to the irregular shape of the trapezoidal bone, the CMC joint axis has no fixed precise position. So, all current anthropomorphic robots They all use traditional mechanical connections, which are fixed rotation axes. Therefore, these traditional robots cannot restore the natural thumb movement. We scanned the cadaveric hand skeleton, 3D printed artificial bones, and the artificial finger joints. The range of motion, stiffness, and dynamic behavior are very close to the human hand. Our robotic design uniquely retains important human biomechanical information and reaches an anatomical level."
Xinxiang Mina Import & Export Co., Ltd. , https://www.mina-motor.cn